
LPX E3工业级区域监控雷达
40m 监控半径,0.1125° 高分辨率,64 区域组,≥80Klux





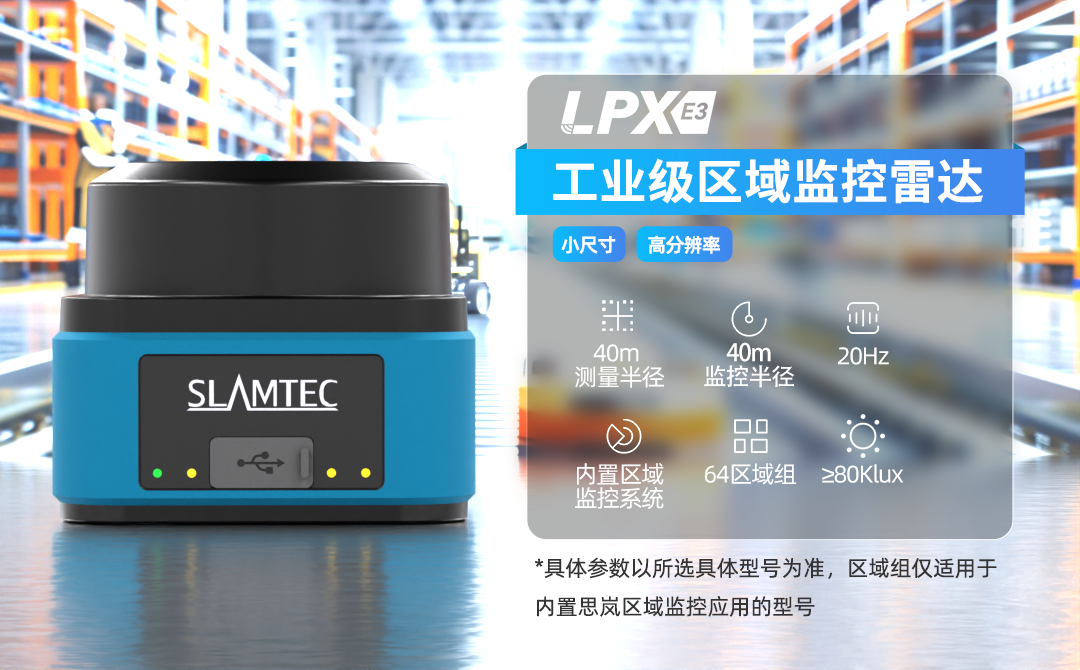













40m 监控半径,0.1125° 高分辨率,64 区域组,≥80Klux
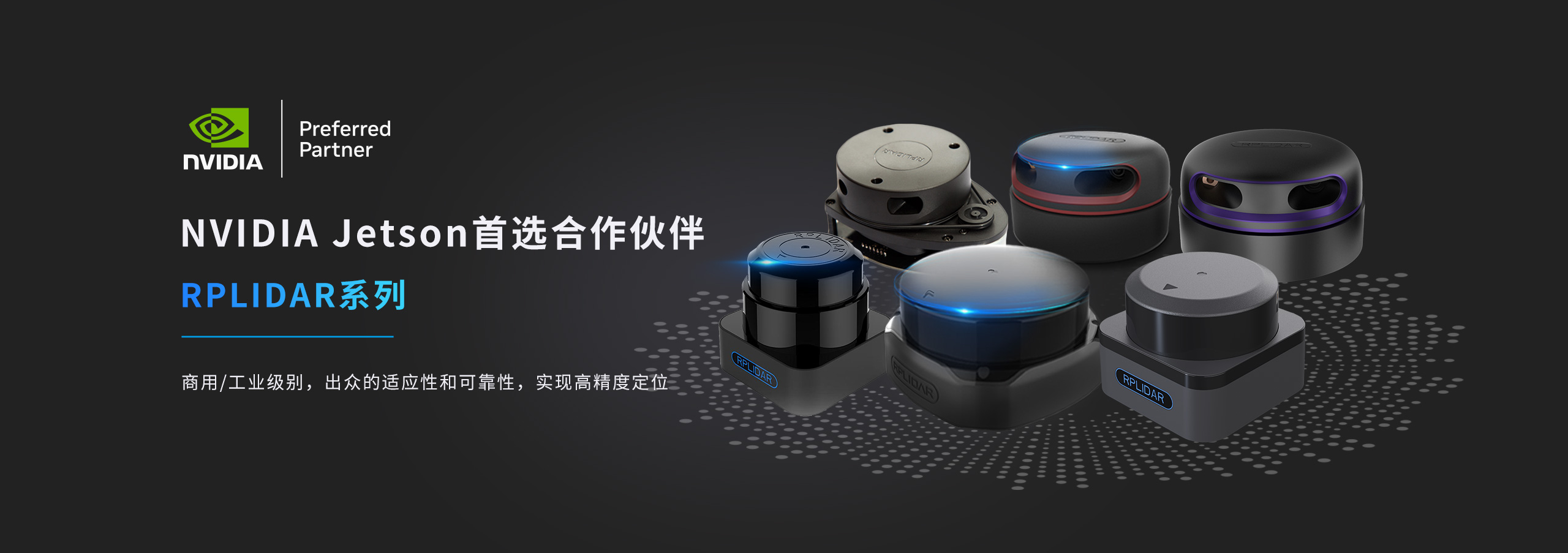
40m测距半径、60K采样频率、±30mm测距精度,0.12°

40m测距半径、32K采样频率、0.1125°、室内外均可使用
30m测距半径、32K采样频率、0.12°、IP65

Hermes赫尔墨斯多楼层运动服务机器人平台

性能更强、体积更小、部署更轻、协作更灵



思岚科技官方微信

