
RPLIDAR S3 SL-Dtof激光雷达
40m测距半径、32K采样频率、0.1125°、室内外均可使用




















40m测距半径、32K采样频率、0.1125°、室内外均可使用
30m测距半径、32K采样频率、0.12°、IP65

打破三角测距激光雷达测距局限,采样频率高达16000次/秒,25米测距

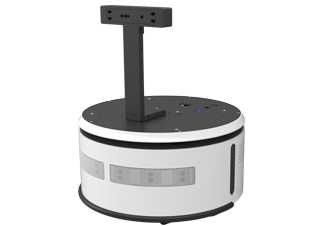
Hermes赫尔墨斯多楼层运动服务机器人平台

性能更强、体积更小、部署更轻、协作更灵
接口丰富,可扩展性强,可满足不同应用需求



思岚科技官方微信

